¶ Background
After the success of David and I's Rubik's Cube Solver, we both went on to work on next year's project, this time on our own individual projects. To be perfectly frank, I didn't end up putting a whole lot of time into this project, as I started it only a month or two before the Rochester Science Fair. Despite the limitations of the prototype orthotic, and the lack of user testing, I managed to get quite far in the competition, including competing at the 2011 National Junior Science and Humanities Symposium (JSHS).
¶ Project Abstract
 Brachial Plexus Injury (BPI) is a neurological injury that may result in paralysis of the shoulder and arm. It is often the result of severe shoulder trauma, involving younger patients. Patients can regain some shoulder and elbow movement through microsurgery and tendon transfer surgery. However, long-term outcomes are often disappointing. There is currently a lack of powered orthotics for BPI patients.
Brachial Plexus Injury (BPI) is a neurological injury that may result in paralysis of the shoulder and arm. It is often the result of severe shoulder trauma, involving younger patients. Patients can regain some shoulder and elbow movement through microsurgery and tendon transfer surgery. However, long-term outcomes are often disappointing. There is currently a lack of powered orthotics for BPI patients.
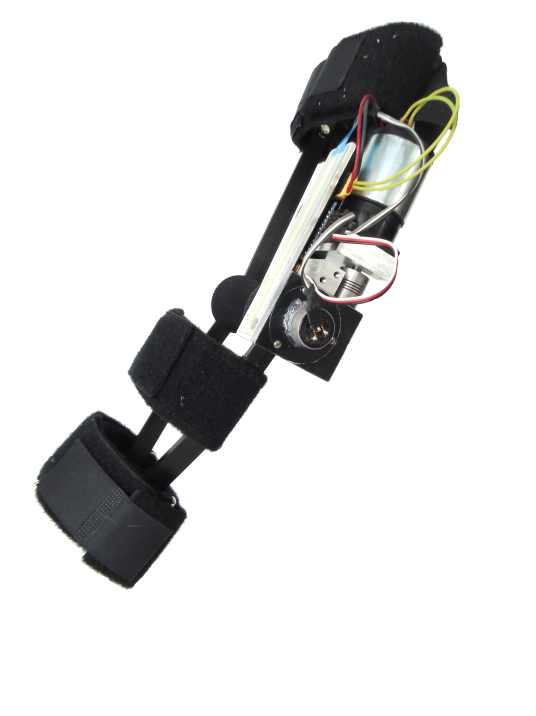
The goal of this project was to design a robotic orthosis capable of providing elbow and shoulder movement to patients with this particular injury. An Arduino microcontroller was programmed to interface an accelerometer, DC motor, touch sensitive linear slide, and a potentiometer to control elbow flexion. Shoulder rotation was achieved by transferring the motion of the opposite arm through a strap connected to the orthosis. Elbow flexion was controlled by tilting the accelerometer, which was embedded in a pair of glasses, and with the linear slide, if so desired. The finished product was relatively lightweight and compact, and provided a range of motion and strength comparable or superior to tendon transfer surgery. The orthotic was simple to use with practice, and could be practical for everyday use. Powered orthotics with a similar design could assist a variety of paralysis patients.
¶ Awards
¶ 2011 Rochester Regional Science Fair
- First Place Paper Presentation
- Second ISEF Award
¶ 2011 State Junior Science and Humanities Symposium (JSHS)
- First Place Finalist